


近期,我校机械与自动化学院张秀梅博士及其合作者在人机智能系统主动协同控制领域取得重要进展。两项研究成果分别发表于国际重要学术期刊Neurocomputing和国际学术会议第5届IFAC偏微分方程控制系统控制研讨会上。
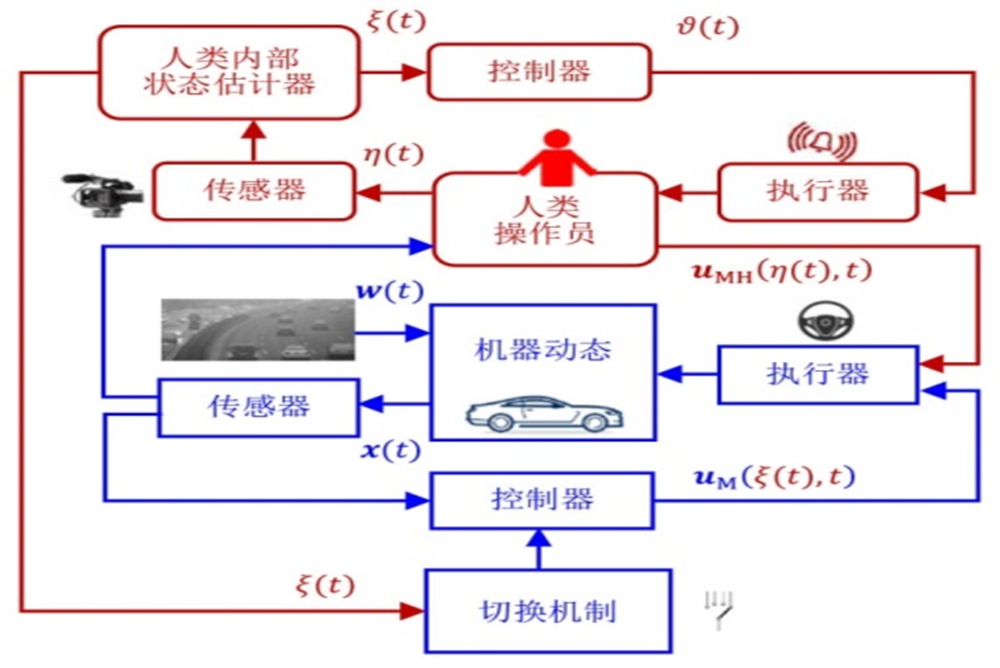
论文一“非线性人在回路系统的辅助人类模糊控制”发表于Neurocomputing,该研究可有效解决人类对机器的不当操作行为造成的人机交互失效问题,提出了针对机器的主动协同模糊控制及针对人类的反馈控制设计方法,保证了人机交互系统的稳定性和干扰衰减性能,为“人机共驾”应用提供理论基础。
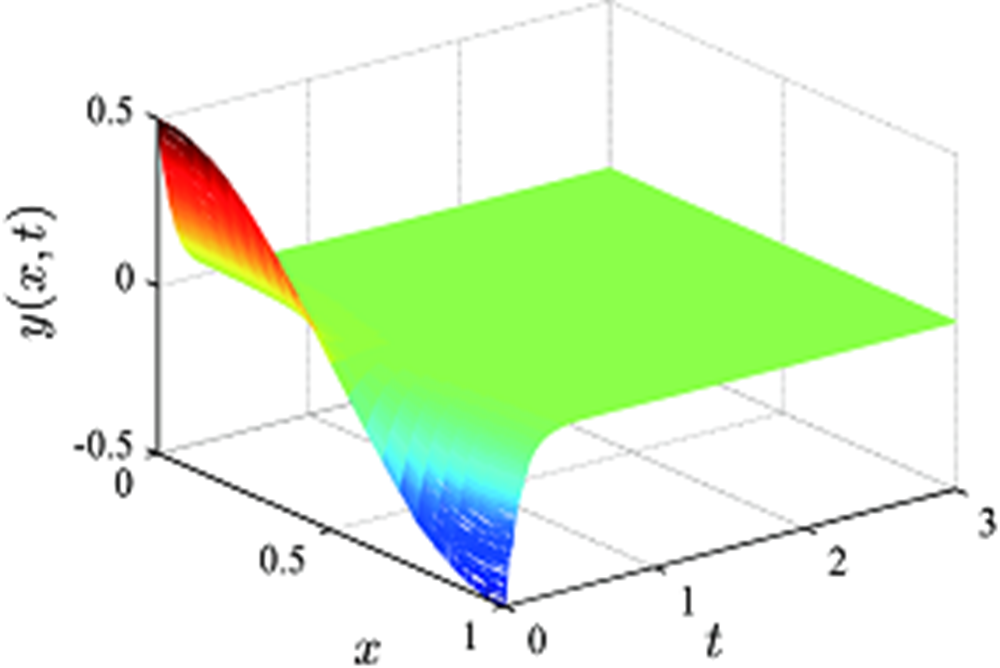
论文二“非线性随机分布参数系统的边界控制”发表于第5届IFAC偏微分方程控制系统控制研讨会,该重要进展为了克服复杂随机因素对非线性随机分布参数系统时空动态行为的影响,利用同位边界传感器与执行器,提出了基于估计器的边界控制方法,保证了闭环增广系统的稳定性和干扰衰减性能,为具有复杂动态特性的人机交互系统奠定理论基础。
【作者:王进 审核:解福祥 编辑:张灏 责编:蔡月梅 终审:李庆军】
Powered 潍坊学院新闻中心
新闻中心电话:0536-8785616
投稿信箱:xinwzx@126.com

 2026-07-24
2026-07-24